ubuntu18.04にwordpressをインストールしてmysqlでDBを表示させるまで
- ubuntu18.04 serverをインストール
- LAMP環境の構築
www.digitalocean.com - WordPressサーバをインストール
www.yokoweb.net - wordpressの使い方
nandemo-nobiru.com - phpMyAdminをインストール
www.yokoweb.net インストールにエラーが出る場合
stackoverflow.com
phpmyadminの使い方
www.dbonline.jp - ショートコードの使い方
bge.jp - phpでのmysqlの使い方
qiita.com


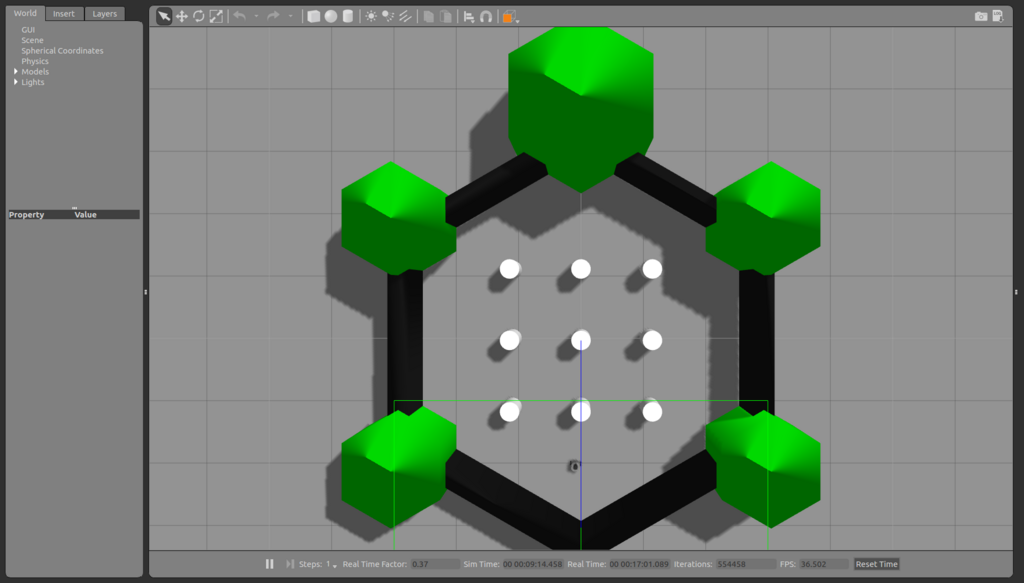
複数のturtlebot3のシミュレーション環境
turtlebot3_worldに3つのturtlebotを設置した。 初期状態のフィールドとlaunchを以下に示す。

各turtlebot3は以下のコマンドで操作可能。
$ rosrun turtlebot3_teleop turtlebot3_teleop_key cmd_vel:=tb3_0/cmd_vel
$ rosrun turtlebot3_teleop turtlebot3_teleop_key cmd_vel:=tb3_1/cmd_vel
新卒でメーカーから就職先を選ぶ際の就活メモ
就活が終わりました。 今後のために企業の選び方についてメモっておきます。 ちなみに業界はメーカーのみです。
就活の流れ
インターンを通じて就活の模擬練習
夏や冬に2週間程度のインターンが開催されるので、企業選びを通じて志望業界などのイメージを固める。
書籍として業界地図やMONOを参考にした。
大手以外のインターンは雑と聞いたので、夏はとりあえず志望業界の中で大手をいくつか受ける。
2つ受かったが期間が重なっていたので適当に片方を選ぶ。当時は気にしていなかったが、選んだ方はcore30で選ばなかった方はリストラが盛んな企業であった。
冬は1社のみ受けたが落ちた。
夏のインターン生は就活意欲が低いが冬のインターン生は御社に入社しますオーラが漂っているらしい。
なんとなく志望業界が定まる。
turtlebot3のLiderを用いて指定位置まで自律移動させる
turtlebot3を自律移動させるパッケージとしてnavigationがあります。
navigationを利用して指定位置までturtlebot3を動かすノードを作ってみます。
mapの作成
まず環境マップを作成する。 今回は例としてシミュレーション環境のturtlebot3_worldを用いる。
端末を開き
$ roslaunch turtlebot3_gazebo turtlebot3_world.launch
シミュレーション環境が構築される。
slamを参考にしてmap.pgmとmap.yamlを作成する。
移動先を指定するノードの調査
端末を開き
$ roslaunch turtlebot3_gazebo turtlebot3_world.launch
navigationを参考にしてmapファイルを読み込み、rivzで表示する。

rvizの2D Pose Estimateを選択してturtlebot3の初期位置を設定する。同様に2D Nav Goalを選択するとturtlebot3の移動先を設定できる。
この状態でのノード・トピックの関係を確認するため、他の端末を開き
$ rqt_graph続きを読む
turtlebot3 burgerを動かしてみた
概要
turtlebot3_burgerを使ってみる機会があったので組み立てからLRFの動作確認までの手順を簡単にまとめました。
詳細な環境構築についてはe-Manualに書いてあります。
turtlebot3の組み立て
同封された説明書を読みながら組み立てる。
サーボモータの動作確認
basic-operationを参考にし、駆動回路のsw1とsw2を押してサーボの動作確認を行う。
ホストPCの環境構築
pc_setupを参考にしてホストPCにubuntu16.04とrosをインストールする。
続きを読むROSでserviceによる通信
1. ROSパッケージを作る
cd ~/catkin_ws
catkin_create_pkg test_service rospy
新しくプロジェクトを作成した直後の~/catkin_ws/test_serviceのディレクトリ構成は以下のようなファイル階層だと思われる。
.
├── CMakeLists.txt
├── package.xml
└── src
2. サービスを定義する
新しいサービスを作成するには3ステップある。
- サービスコールの入出力のためのサービス定義ファイルの作成
- ビルドシステム1の変更
- ビルドシステム2の変更
1.サービス定義ファイルの作成
gedit ~/catkin_ws/src/test_service/srv/WordCount.srv
以下の文字列を貼り付ける
string words
---
uint32 count