turtlebot3のLiderを用いて指定位置まで自律移動させる
turtlebot3を自律移動させるパッケージとしてnavigationがあります。
navigationを利用して指定位置までturtlebot3を動かすノードを作ってみます。
mapの作成
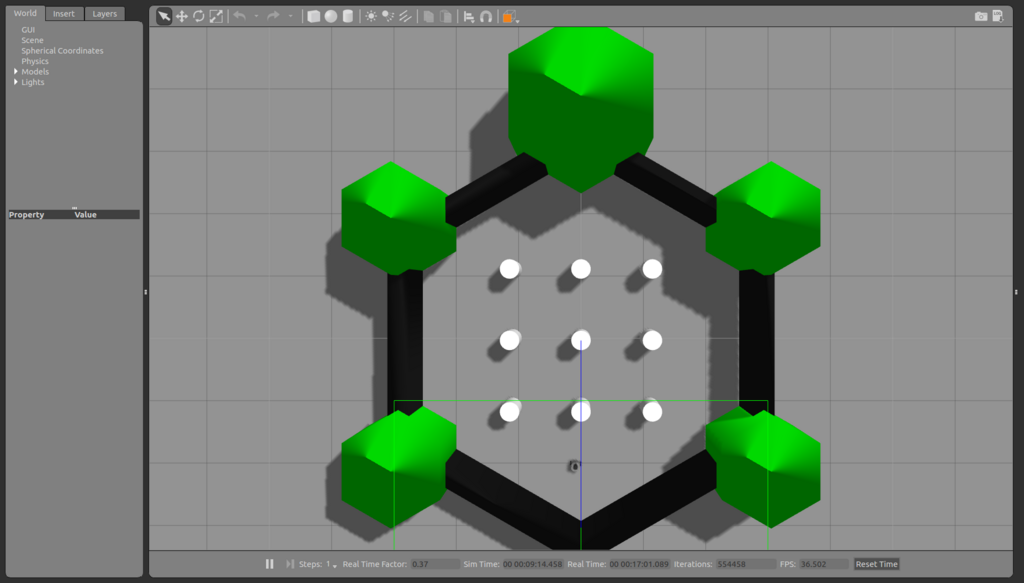
まず環境マップを作成する。 今回は例としてシミュレーション環境のturtlebot3_worldを用いる。
端末を開き
$ roslaunch turtlebot3_gazebo turtlebot3_world.launch
シミュレーション環境が構築される。
slamを参考にしてmap.pgmとmap.yamlを作成する。
移動先を指定するノードの調査
端末を開き
$ roslaunch turtlebot3_gazebo turtlebot3_world.launch
navigationを参考にしてmapファイルを読み込み、rivzで表示する。

rvizの2D Pose Estimateを選択してturtlebot3の初期位置を設定する。同様に2D Nav Goalを選択するとturtlebot3の移動先を設定できる。
この状態でのノード・トピックの関係を確認するため、他の端末を開き
$ rqt_graph

/move_base/goalが移動先を設定するトピックだと考えられる。
/move_base/goalについて調査する。
アクティブなトピックをリスト表示する。
$ rostopic list /amcl/parameter_descriptions ... /move_base/goal ...
/move_base/goalがトピックであると再度確認できた。
/move_base/goalのトピックの型を確認する。
$ rostopic type /move_base/goal move_base_msgs/MoveBaseActionGoal
move_base_msgs/MoveBaseActionGoalのメッセージタイプの構造を確認する。
$ rosmsg show move_base_msgs/MoveBaseActionGoal
std_msgs/Header header
uint32 seq
time stamp
string frame_id
actionlib_msgs/GoalID goal_id
time stamp
string id
move_base_msgs/MoveBaseGoal goal
geometry_msgs/PoseStamped target_pose
std_msgs/Header header
uint32 seq
time stamp
string frame_id
geometry_msgs/Pose pose
geometry_msgs/Point position
float64 x
float64 y
float64 z
geometry_msgs/Quaternion orientation
float64 x
float64 y
float64 z
float64 w
実際に/move_base/goalにはどんなメッセージが送られているかを確認する。rostopic echoにてメッセージを待ち、rviz上で2D Nav Goalで移動先を設定すると以下のようなメッセージが確認できる。
$ rostopic echo /move_base/goal
header:
seq: 1
stamp:
secs: 98
nsecs: 87000000
frame_id: ''
goal_id:
stamp:
secs: 0
nsecs: 0
id: ''
goal:
target_pose:
header:
seq: 1
stamp:
secs: 98
nsecs: 86000000
frame_id: "map"
pose:
position:
x: -1.93752658367
y: -0.244830369949
z: 0.0
orientation:
x: 0.0
y: 0.0
z: 0.707669681949
w: 0.706543431963
以上の情報を元に適当に指定した位置を/move_base/goalにpublishするプログラムを以下に示す。
#!/usr/bin/python
# coding: UTF-8
import rospy
from move_base_msgs.msg import MoveBaseActionGoal
rospy.init_node('topic_publisher')
pub = rospy.Publisher('/move_base/goal', MoveBaseActionGoal, queue_size=5)
rate = rospy.Rate(0.1)
target_pos=MoveBaseActionGoal()
target_pos.goal.target_pose.header.frame_id = "map"
target_pos.goal.target_pose.pose.position.x = -2.0
target_pos.goal.target_pose.pose.orientation.w = 0.999607289662
count = 0
while not rospy.is_shutdown():
target_pos.header.stamp = rospy.Time.now()
target_pos.goal.target_pose.header.stamp = rospy.Time.now()
pub.publish(target_pos)
rate.sleep()
count += 1
print count
指定位置まで移動するプログラムの実行
端末を開き
roslaunch turtlebot3_gazebo turtlebot3_world.launch
別の端末を開き
roslaunch turtlebot3_navigation turtlebot3_navigation.launch map_file:=$HOME/map.yaml
別の端末を開き
rosrun rviz rviz -d `rospack find turtlebot3_navigation`/rviz/turtlebot3_nav.rviz
別の端末を開き、先ほどのプログラムを実行