新卒でメーカーから就職先を選ぶ際の就活メモ
就活が終わりました。 今後のために企業の選び方についてメモっておきます。 ちなみに業界はメーカーのみです。
就活の流れ
インターンを通じて就活の模擬練習
夏や冬に2週間程度のインターンが開催されるので、企業選びを通じて志望業界などのイメージを固める。
書籍として業界地図やMONOを参考にした。
大手以外のインターンは雑と聞いたので、夏はとりあえず志望業界の中で大手をいくつか受ける。
2つ受かったが期間が重なっていたので適当に片方を選ぶ。当時は気にしていなかったが、選んだ方はcore30で選ばなかった方はリストラが盛んな企業であった。
冬は1社のみ受けたが落ちた。
夏のインターン生は就活意欲が低いが冬のインターン生は御社に入社しますオーラが漂っているらしい。
なんとなく志望業界が定まる。
turtlebot3のLiderを用いて指定位置まで自律移動させる
turtlebot3を自律移動させるパッケージとしてnavigationがあります。
navigationを利用して指定位置までturtlebot3を動かすノードを作ってみます。
mapの作成
まず環境マップを作成する。 今回は例としてシミュレーション環境のturtlebot3_worldを用いる。
端末を開き
$ roslaunch turtlebot3_gazebo turtlebot3_world.launch
シミュレーション環境が構築される。
slamを参考にしてmap.pgmとmap.yamlを作成する。
移動先を指定するノードの調査
端末を開き
$ roslaunch turtlebot3_gazebo turtlebot3_world.launch
navigationを参考にしてmapファイルを読み込み、rivzで表示する。

rvizの2D Pose Estimateを選択してturtlebot3の初期位置を設定する。同様に2D Nav Goalを選択するとturtlebot3の移動先を設定できる。
この状態でのノード・トピックの関係を確認するため、他の端末を開き
$ rqt_graph続きを読む
turtlebot3 burgerを動かしてみた
概要
turtlebot3_burgerを使ってみる機会があったので組み立てからLRFの動作確認までの手順を簡単にまとめました。
詳細な環境構築についてはe-Manualに書いてあります。
turtlebot3の組み立て
同封された説明書を読みながら組み立てる。
サーボモータの動作確認
basic-operationを参考にし、駆動回路のsw1とsw2を押してサーボの動作確認を行う。
ホストPCの環境構築
pc_setupを参考にしてホストPCにubuntu16.04とrosをインストールする。
続きを読むROSでserviceによる通信
1. ROSパッケージを作る
cd ~/catkin_ws
catkin_create_pkg test_service rospy
新しくプロジェクトを作成した直後の~/catkin_ws/test_serviceのディレクトリ構成は以下のようなファイル階層だと思われる。
.
├── CMakeLists.txt
├── package.xml
└── src
2. サービスを定義する
新しいサービスを作成するには3ステップある。
- サービスコールの入出力のためのサービス定義ファイルの作成
- ビルドシステム1の変更
- ビルドシステム2の変更
1.サービス定義ファイルの作成
gedit ~/catkin_ws/src/test_service/srv/WordCount.srv
以下の文字列を貼り付ける
string words
---
uint32 count
ROSの開発環境構築からpub/sub通信まで
0. ubuntuの起動とROSの環境構築
開発環境であるubuntu16.04を用意して起動する。
参考:https://kledgeb.blogspot.jp/2016/04/ubuntu-1604-1-ubuntu-1604ubuntuubuntu.html
次にROS KineticのUbuntu16.04 へのインストールを行う。
端末を立ち上げて以下のコマンドを入力する。
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu \
$(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 \
--recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full python-rosinstall
sudo rosdep init
rosdep update
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
1. ROSのワークスペースを作る
端末を立ち上げて以下のコマンドを入力する。
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
ここで一度makeしておく。
ROSではcatkin_makeというコマンドを使ってワークスペースのプロジェクトをビルドする。
また、初回でこのコマンドを行えばワークスペースに必要なファイルやディレクトリが生成される。
catkin_make
catkin_makeしたら以下のようなファイル階層になっていると思われる。
ros_ws
|--build
|--devel
|--src
- build: ビルドに関する設定やmakeのlogのファイルが入っている。
- devel: 実行ファイルやmakeによって生成されたものが入っている。
- src: ユーザがソースコードを保存する場所。
これでROSのワークスペースが作成できた
続きを読むROSのプロセス通信の概要
ROSにおけるプロセス間通信の重要性
ROSで推薦されている開発スタイルは以下の様なものである。
- とにかくプロセス(ROSではこれをNodeと呼ぶ)を立ち上げまくる
- プロセス間のデータはネットワーク経由で通信する
例えば、上の図のようなシステム構成を考えてみる。
これは、ステレオ視によって外部の三次元の環境を認識し、それを回避するような動作計画を行うロボットシステムである。
このようなシステムをROSで実装する場合、角丸で囲われているものがそれぞれ独立したプロセスとして実行される。
そして、矢印で繋がれた部分がプロセス間通信である。
このようなスタイルで開発されたシステムにおける利点は、
- 特に何も考えなくてもマルチコアの恩恵を受けられる
- システムの一部(あるプロセス)がバグで死んでも、システム全体は死なない
- 複数マシンでの分散システムに自然と拡張できる
- コードの再利用性が高くなる
といったものがあげられる。
続きを読むROSのシステム構成図
センサやアクチュエータを用いる場合のROSのシステム構成図
センサやアクチュエータとPC(ROS)のシステム構成図を以下に示す。

脳みそとなる部分にはPCを用いる。PCはデスクトップ型やノート型、Raspberry Piシリーズなどubuntuの動くものであれば良い。
センサ類は基本的にusbでPCと接続する。組み込み用途のセンサなどusbでデータを送れないセンサは、一旦電子基板で処理してからPCにusbなどで送る。
アクチュエータ類もPCから直接は動かせないので、一度ドライバなどの電子基板を経由して駆動させる。
PCは得られたセンサ類の情報から次に駆動させるアクチュエータの計算を行う。
ARC2017に出場しROSを用いたチームのシステム構成図を示す。
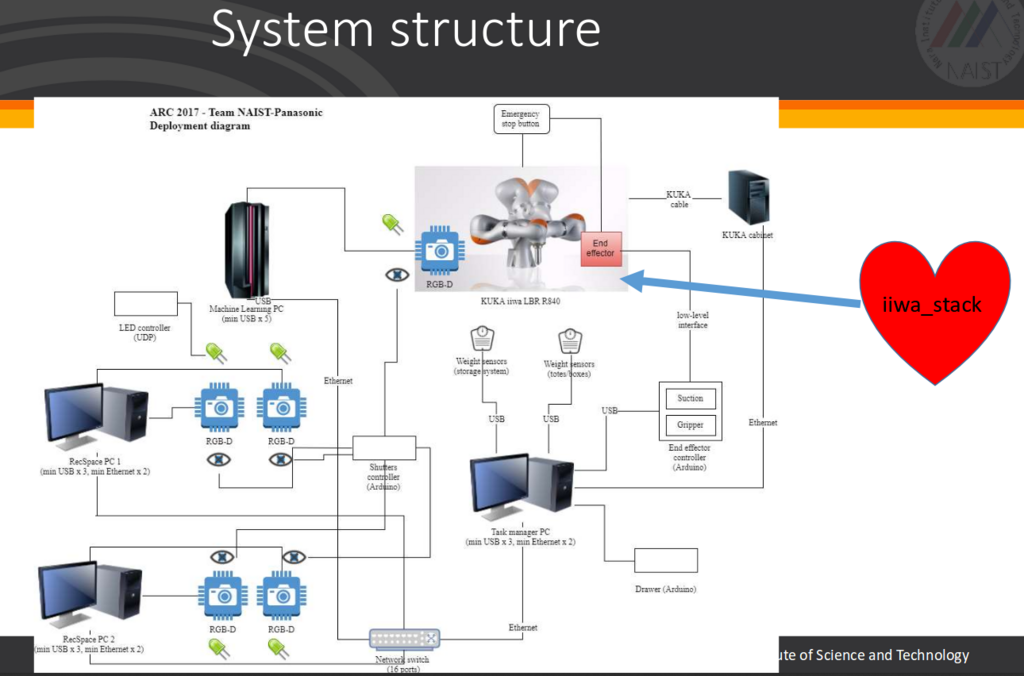
複数のカメラ、役割分担された複数のPCを用いているが、基本的な構成は同じである。
続きを読む